Selbstbau Roboter, der Türen öffnen und schließen kann – Schritt 1: Türen schieben und ziehen
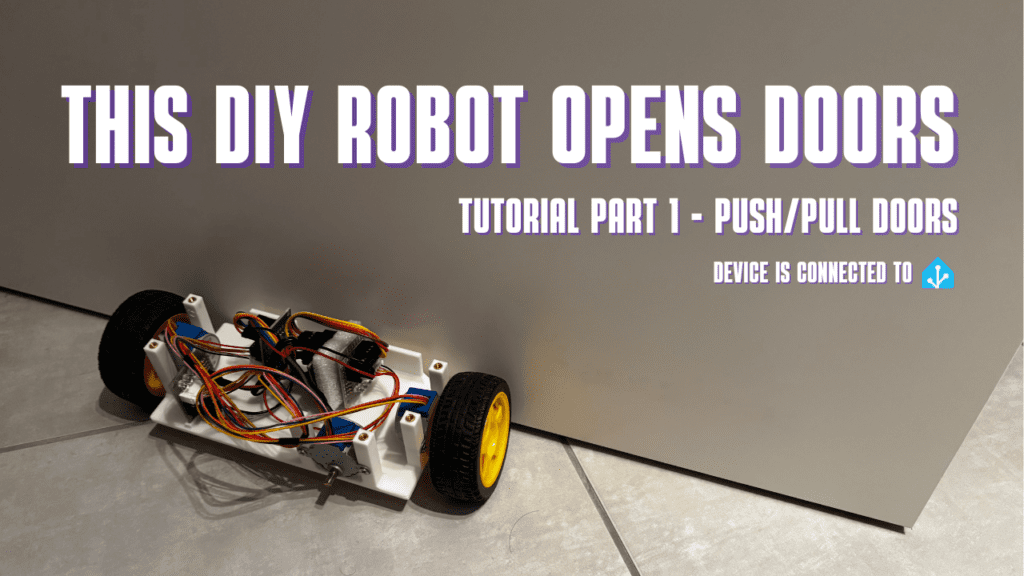
Hast du dich schon einmal gefragt, wie du Türen in deinem Haus automatisch öffnen oder schließen kannst, ohne eine hässliche Stangenlösung oben an der Tür dauerhaft zu installieren? Genau das versuche ich zu bauen – einen Roboter, der Türen automatisch öffnen und schließen kann. Und ich möchte dich auf diese Reise mitnehmen. Ich werde dazu eine YouTube-Videoserie machen!
Das erste Video findest du hier (Hinweis: Video nur auf Englisch) – im ersten Video bringen wir den Roboter dazu, die Tür zu schieben und zu ziehen:
Den ESPHome YAML-Code sowie Links zu den STL-Dateien für den 3D-Druck des Gehäuses findest du in diesem Beitrag.
ESPHome YAML Code
esphome:
name: door-operating-robot
friendly_name: door_operating_robot
on_boot:
- text_sensor.template.publish:
id: door_state
state: "Door paused"
- text_sensor.template.publish:
id: handle_state
state: "Handle paused"
on_loop:
then:
- stepper.report_position:
id: motor_right_wheel
position: 0
- stepper.report_position:
id: motor_left_wheel
position: 0
- stepper.report_position:
id: motor_door_handle
position: 0
esp32:
board: esp32dev
framework:
type: arduino
# Enable logging
logger:
# Enable Home Assistant API
api:
encryption:
key: YOUR_ENCRYPTION_KEY
ota:
- platform: esphome
password: YOUR_OTA_PASSWORD
wifi:
ssid: !secret wifi_ssid
password: !secret wifi_password
# Enable fallback hotspot (captive portal) in case wifi connection fails
ap:
ssid: "Door-Operating-Robot"
password: YOUR_AP_PASSWORD
captive_portal:
globals:
- id: motor_left_running
type: bool
restore_value: no
initial_value: 'false'
- id: motor_right_running
type: bool
restore_value: no
initial_value: 'false'
- id: motor_handle_running
type: bool
restore_value: no
initial_value: 'false'
stepper:
- platform: uln2003
id: motor_left_wheel
pin_a: GPIO26
pin_b: GPIO18
pin_c: GPIO19
pin_d: GPIO23
max_speed: 500 steps/s
- platform: uln2003
id: motor_right_wheel
pin_a: GPIO22
pin_b: GPIO21
pin_c: GPIO17
pin_d: GPIO16
max_speed: 500 steps/s
- platform: uln2003
id: motor_door_handle
pin_a: GPIO27
pin_b: GPIO25
pin_c: GPIO32
pin_d: GPIO4
max_speed: 250 steps/s
button:
- platform: template
name: "Open door"
on_press:
- script.execute: start_motor_left_backward
- script.execute: start_motor_right_backward
- text_sensor.template.publish:
id: door_state
state: "Opening door"
- platform: template
name: "Close door"
on_press:
- script.execute: start_motor_left_forward
- script.execute: start_motor_right_forward
- text_sensor.template.publish:
id: door_state
state: "Closing door"
- platform: template
name: "Pause door"
on_press:
- script.execute: stop_motor_left
- script.execute: stop_motor_right
- text_sensor.template.publish:
id: door_state
state: "Door Paused"
- platform: template
name: "Unlock handle"
on_press:
- script.execute: start_motor_handle_forward
- text_sensor.template.publish:
id: handle_state
state: "Unlocking handle"
- platform: template
name: "Release handle"
on_press:
- script.execute: start_motor_handle_backward
- text_sensor.template.publish:
id: handle_state
state: "Releasing handle"
- platform: template
name: "Pause handle"
on_press:
- script.execute: stop_motor_handle
- text_sensor.template.publish:
id: handle_state
state: "Handle paused"
text_sensor:
- platform: template
name: "Door state"
id: door_state
- platform: template
name: "Handle state"
id: handle_state
script:
- id: start_motor_left_forward
then:
- lambda: 'id(motor_left_running) = true;'
- stepper.set_target:
id: motor_left_wheel
target: -10
- id: start_motor_left_backward
then:
- lambda: 'id(motor_left_running) = true;'
- stepper.set_target:
id: motor_left_wheel
target: 10
- id: stop_motor_left
then:
- lambda: 'id(motor_left_running) = false;'
- stepper.set_target:
id: motor_left_wheel
target: 0
- id: start_motor_right_forward
then:
- lambda: 'id(motor_right_running) = true;'
- stepper.set_target:
id: motor_right_wheel
target: 10
- id: start_motor_right_backward
then:
- lambda: 'id(motor_right_running) = true;'
- stepper.set_target:
id: motor_right_wheel
target: -10
- id: stop_motor_right
then:
- lambda: 'id(motor_right_running) = false;'
- stepper.set_target:
id: motor_right_wheel
target: 0
- id: start_motor_handle_forward
then:
- lambda: 'id(motor_left_running) = true;'
- stepper.set_target:
id: motor_door_handle
target: -10
- id: start_motor_handle_backward
then:
- lambda: 'id(motor_left_running) = true;'
- stepper.set_target:
id: motor_door_handle
target: 10
- id: stop_motor_handle
then:
- lambda: 'id(motor_left_running) = false;'
- stepper.set_target:
id: motor_door_handle
target: 0STL Dateien für das Gehäuse
Die STL Dateien für das Gehäuse können hier herunter geladen werden:
https://www.printables.com/model/1029199-door-operating-robot-v1


Schreibe einen Kommentar